

| Model | Backbone | Sim-Real Config | NAVSIM v2 navhard | NAVSIM v2 navtest | ||
|---|---|---|---|---|---|---|
| EPDMS | CKPT | EPDMS | CKPT | |||
| LTF | ResNet34 | w/ pseudo-expert | 30.3 | +6.9 | HF / MS | 84.4 | +2.9 | HF / MS |
| DiffusionDrive | ResNet34 | w/ pseudo-expert | 32.6 | +5.1 | HF / MS | 85.9 | +1.7 | HF / MS |
| GTRS-Dense | ResNet34 | w/ pseudo-expert | 46.1 | +7.8 | HF / MS | 84.0 | +1.7 | HF / MS |
| rewards only | 46.9 | +8.6 | HF / MS | 84.6 | +2.3 | HF / MS | ||
| V2-99 | w/ pseudo-expert | 47.7 | +5.8 | HF / MS | 84.5 | +0.5 | HF / MS | |
| rewards only | 48.0 | +6.1 | HF / MS | 84.8 | +0.8 | HF / MS | ||
| Split / Sim. Round | # Tokens | Logs | Sensors_Hist | Sensors_Fut | Link | Planner-based Pseudo-Expert |
|---|---|---|---|---|---|
| reaction_pdm_v1.0-0 | 65K | 9.9GB | 569GB | 1.2T | HF+ HF_Fut / MS |
| reaction_pdm_v1.0-1 | 55K | 8.5GB | 448GB | 964GB | HF+ HF_Fut / MS |
| reaction_pdm_v1.0-2 | 46K | 6.9GB | 402GB | 801GB | HF+ HF_Fut / MS |
| reaction_pdm_v1.0-3 | 38K | 5.6GB | 333GB | 663GB | HF+ HF_Fut / MS |
| reaction_pdm_v1.0-4 | 32K | 4.7GB | 279GB | 554GB | HF+ HF_Fut / MS | Recovery-based Pseudo-Expert |
| reaction_recovery_v1.0-0 | 45K | 6.8GB | 395GB | 789GB | HF+ HF_Fut / MS |
| reaction_recovery_v1.0-1 | 36K | 5.5GB | 316GB | 631GB | HF+ HF_Fut / MS |
| reaction_recovery_v1.0-2 | 28K | 4.3GB | 244GB | 488GB | HF+ HF_Fut / MS |
| reaction_recovery_v1.0-3 | 22K | 3.3GB | 189GB | 378GB | HF+ HF_Fut / MS |
| reaction_recovery_v1.0-4 | 17K | 2.7GB | 148GB | 296GB | HF+ HF_Fut / MS |

|
5c9694f15f9c5537 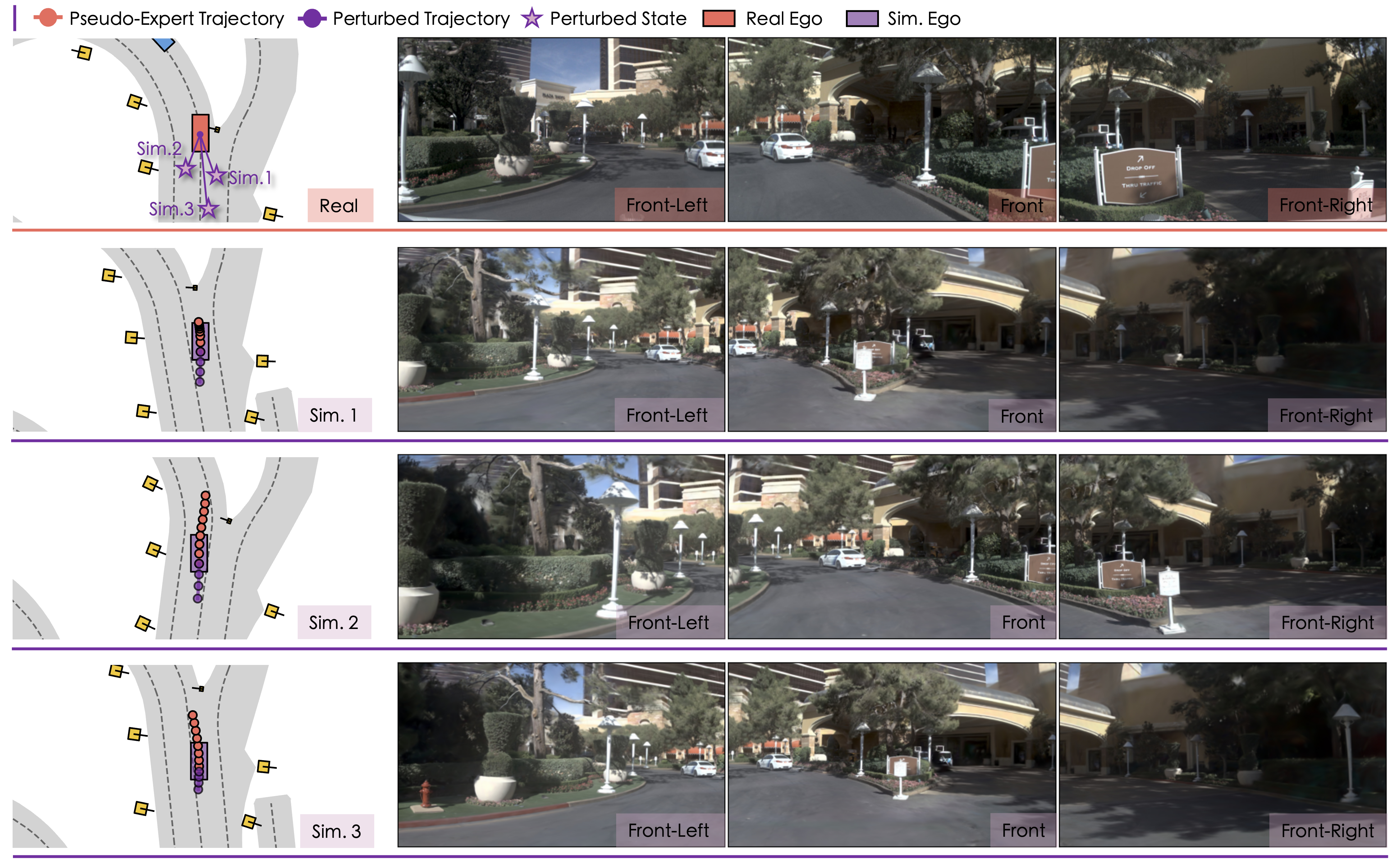
|
367cfa28901257ee 
|
d37c49db3dcd59fa 
|
|
Sim. 1  Sim. 2  Sim. 3 
|
Sim. 1  Sim. 2  Sim. 3 
|
Sim. 1  Sim. 2  Sim. 3 
|