# M-LOAM
**Repository Path**: bryantaoli/M-LOAM
## Basic Information
- **Project Name**: M-LOAM
- **Description**: No description available
- **Primary Language**: Unknown
- **License**: Not specified
- **Default Branch**: develop/bash
- **Homepage**: None
- **GVP Project**: No
## Statistics
- **Stars**: 0
- **Forks**: 1
- **Created**: 2021-05-05
- **Last Updated**: 2021-05-12
## Categories & Tags
**Categories**: Uncategorized
**Tags**: None
## README
# M-LOAM
## Robust Odometry and Mapping for Multi-LiDAR Systems with Online Extrinsic Calibration
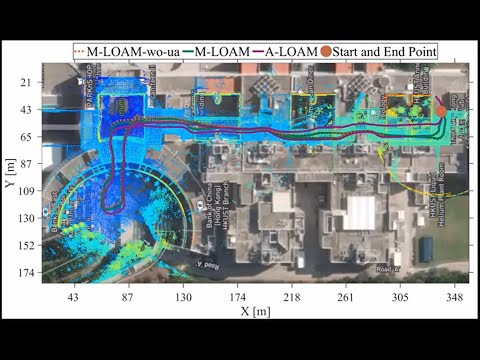
M-LOAM is a robust system for multi-LiDAR extrinsic calibration, real-time odometry, and mapping. Without manual intervention, our system can start with several extrinsic-uncalibrated LiDARs, automatically calibrate their extrinsics, and provide accurate poses as well as a globally consistent map.
**Authors:**
[Jianhao Jiao](http://gogojjh.github.io),
[Haoyang Ye](https://github.com/hyye),
[Yilong Zhu](https://scholar.google.com/citations?user=x8n6v2oAAAAJ&hl=zh-CN),
[Linxin Jiang](xxx),
[Ming Liu](https://scholar.google.com/citations?user=CdV5LfQAAAAJ&hl=zh-CN)
from [RAM-LAB](https://www.ram-lab.com), [HKUST](http://www.ust.hk)
**Project website:** https://ram-lab.com/file/site/m-loam
**Videos:**
 **Related Papers**
* **Robust Odometry and Mapping for Multi-LiDAR Systems with Online Extrinsic Calibration**, Jianhao Jiao, Haoyang Ye, Yilong Zhu, Ming Liu, under review. [pdf](https://arxiv.org/pdf/2010.14294.pdf)
* **Greedy-Based Feature Selection for Efficient LiDAR SLAM**, Jianhao Jiao, Yilong Zhu, Haoyang Ye, Huaiyang Huang, Peng Yun, Linxin Jiang, Lujia Wang, Ming Liu, under review.
* **MLOD: Awareness of Extrinsic Perturbation in Multi-LiDAR 3D Object Detection for Autonomous Driving**, Jianhao Jiao*, Peng Yun*, Lei Tai, Ming Liu, IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS, 2020). [pdf](https://arxiv.org/abs/2010.11702.pdf)
*If you use M-LOAM for your academic research, please cite one of our paper.* [bib](https://github.com/gogojjh/M-LOAM/blob/mloam_gf/support_files/paper_bib.txt)
### 1. Prerequisites
1.1 **Ubuntu** and **ROS**
Ubuntu 64-bit 16.04 or 18.04.
ROS Kinetic or Melodic. [ROS Installation](http://wiki.ros.org/ROS/Installation)
1.2. **Ceres Solver && Eigen3**
```
./setup/install_eigen3_ceres.sh
```
1.3. **OpenMP**
```
sudo apt install libomp-dev
```
1.4 **Libpointmarcher**
```
./setup/install_libnabo.sh
./setup/install_libpointmatcher.sh
```
### 2. Build M-LOAM on ROS
```
mkdir -p ~/catkin_ws/src
cd ~/catkin_ws/src
git clone https://github.com/gogojjh/M-LOAM.git
catkin build mloam
source ~/catkin_ws/devel/setup.bash
```
### 3. Example
* [Datasets](http://gofile.me/4jm56/2iYvOr73R) collected with different platforms:
1. Simulation Robot (SR)
2. Real Handheld Device (RHD)
3. Real Vechile (RV)
4. Oxford RoboCar (OR)
* Run M-LOAM and baseline methods
1. We provide a script to perform batch testing of M-LOAM with baseline methods
2. Enter the script folder: ``roscd mloam/script/``
3. Modify the python script: ``run_mloam.py`` for specific platforms with correct path
4. Modify the shell files for methods in ``xx_main.sh``
5. Run the python script: ``python2 run_mloam.py -program=single_test -sequence=xx -start_idx=0 -end_idx=0``
### 4. System pipeline
This could help you to understand the pipeline of M-LOAM. Note that **mloam_loop** is in development.

### 5. Issues
I have modified the code with several times and tried different new features during the journal review process. The code style is not very perfect. Also in some sequeneces, M-LOAM may not achieve the best performence. Hope you can understand and I will try to fix them.
### 6. TODO
1. Parameter tunning, and a more detailed tutorial .
2. **loop closure**.
3. **Docker** support. The initial Docker file is in the folder: ```docker/Dockerfile```
4. etc.
### 6. Acknowledgements
Thanks for these great works from which we learned to write M-LOAM
* LOAM (J. Zhang and S. Singh. LOAM: Lidar Odometry and Mapping in Real-time) and its advanced version: [A-LOAM](https://github.com/HKUST-Aerial-Robotics/A-LOAM);
* [LEGO-LOAM](https://github.com/RobustFieldAutonomyLab/LeGO-LOAM)
* [LIO-MAPPING](https://github.com/hyye/lio-mapping)
* [VINS-MONO](https://github.com/HKUST-Aerial-Robotics/VINS-Mono)
* [Lidar Perception Library](https://github.com/LidarPerception/common_lib)
### 7. Licence
The source code is released under [GPLv3](http://www.gnu.org/licenses/) license.
We are still working on improving the code reliability. For any technical issues, please contact Jianhao Jiao .
For commercial inquiries, please contact Prof.Ming Liu .
**Related Papers**
* **Robust Odometry and Mapping for Multi-LiDAR Systems with Online Extrinsic Calibration**, Jianhao Jiao, Haoyang Ye, Yilong Zhu, Ming Liu, under review. [pdf](https://arxiv.org/pdf/2010.14294.pdf)
* **Greedy-Based Feature Selection for Efficient LiDAR SLAM**, Jianhao Jiao, Yilong Zhu, Haoyang Ye, Huaiyang Huang, Peng Yun, Linxin Jiang, Lujia Wang, Ming Liu, under review.
* **MLOD: Awareness of Extrinsic Perturbation in Multi-LiDAR 3D Object Detection for Autonomous Driving**, Jianhao Jiao*, Peng Yun*, Lei Tai, Ming Liu, IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS, 2020). [pdf](https://arxiv.org/abs/2010.11702.pdf)
*If you use M-LOAM for your academic research, please cite one of our paper.* [bib](https://github.com/gogojjh/M-LOAM/blob/mloam_gf/support_files/paper_bib.txt)
### 1. Prerequisites
1.1 **Ubuntu** and **ROS**
Ubuntu 64-bit 16.04 or 18.04.
ROS Kinetic or Melodic. [ROS Installation](http://wiki.ros.org/ROS/Installation)
1.2. **Ceres Solver && Eigen3**
```
./setup/install_eigen3_ceres.sh
```
1.3. **OpenMP**
```
sudo apt install libomp-dev
```
1.4 **Libpointmarcher**
```
./setup/install_libnabo.sh
./setup/install_libpointmatcher.sh
```
### 2. Build M-LOAM on ROS
```
mkdir -p ~/catkin_ws/src
cd ~/catkin_ws/src
git clone https://github.com/gogojjh/M-LOAM.git
catkin build mloam
source ~/catkin_ws/devel/setup.bash
```
### 3. Example
* [Datasets](http://gofile.me/4jm56/2iYvOr73R) collected with different platforms:
1. Simulation Robot (SR)
2. Real Handheld Device (RHD)
3. Real Vechile (RV)
4. Oxford RoboCar (OR)
* Run M-LOAM and baseline methods
1. We provide a script to perform batch testing of M-LOAM with baseline methods
2. Enter the script folder: ``roscd mloam/script/``
3. Modify the python script: ``run_mloam.py`` for specific platforms with correct path
4. Modify the shell files for methods in ``xx_main.sh``
5. Run the python script: ``python2 run_mloam.py -program=single_test -sequence=xx -start_idx=0 -end_idx=0``
### 4. System pipeline
This could help you to understand the pipeline of M-LOAM. Note that **mloam_loop** is in development.

### 5. Issues
I have modified the code with several times and tried different new features during the journal review process. The code style is not very perfect. Also in some sequeneces, M-LOAM may not achieve the best performence. Hope you can understand and I will try to fix them.
### 6. TODO
1. Parameter tunning, and a more detailed tutorial .
2. **loop closure**.
3. **Docker** support. The initial Docker file is in the folder: ```docker/Dockerfile```
4. etc.
### 6. Acknowledgements
Thanks for these great works from which we learned to write M-LOAM
* LOAM (J. Zhang and S. Singh. LOAM: Lidar Odometry and Mapping in Real-time) and its advanced version: [A-LOAM](https://github.com/HKUST-Aerial-Robotics/A-LOAM);
* [LEGO-LOAM](https://github.com/RobustFieldAutonomyLab/LeGO-LOAM)
* [LIO-MAPPING](https://github.com/hyye/lio-mapping)
* [VINS-MONO](https://github.com/HKUST-Aerial-Robotics/VINS-Mono)
* [Lidar Perception Library](https://github.com/LidarPerception/common_lib)
### 7. Licence
The source code is released under [GPLv3](http://www.gnu.org/licenses/) license.
We are still working on improving the code reliability. For any technical issues, please contact Jianhao Jiao .
For commercial inquiries, please contact Prof.Ming Liu .